|
软体机器人有着动作敏捷、人机互动安全可靠以及不同环境下适应性优异的优点,因此近年来在工业与生物医疗领域引起了广泛关注与研究兴趣。但是,软体机器人本身的力学柔软特性使其面对现实环境中可能遭遇的穿孔及切割类损伤时,性能会大大降低甚至损毁。为了克服这个致命的问题,科学家开始尝试利用自愈合聚合物材料来设计与构筑软机器人。尽管自愈合聚合物在软体机器人领域取得了一定的进展,但仍然面临着一系列的限制因素,包括力学强度低、愈合时间长、自愈合条件苛刻以及愈合过程功能失效等。因此,开发出具有优异自愈合能力并兼顾力学强度的弹性聚合物材料,对于软体机器人的性能提升以及设计空间开拓,有着重大的研究意义与应用价值。
【图文解析】 近日,新加坡国立大学Ho Ghim Wei课题组开发出一种室温下快速自愈合的磁性软弹性体超分子材料(SHSME),不仅展示了极其优异的自愈合能力,还有着远高于自愈合水凝胶材料的力学强度。这种SHSME材料实现了软体机器人的闭环式设计思路:(1)热可重塑性可以满足变化的器件形态需求;(2)快速自修复提高了软机器人的功能鲁棒性与工作寿命;(3)模块化设计实现了定制化的机器人构造与功能。这项研究以标题A Fast Autonomous Healing Magnetic Elastomer for Instantly Recoverable, Modularly Programmable, and Thermo-recyclable Soft Robots发表于《Advanced Functional Materials》,通讯作者为Ho Ghim Wei教授,文章第一作者为程荫博士。
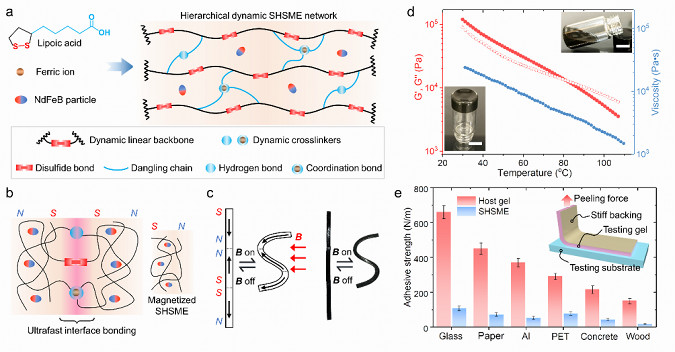
SHSME的合成与自愈合机理 在SHSME材料设计中,利用生物小分子硫辛酸作为聚合物网络基本单元,NdFeB微颗粒作为磁性分散单元。SHSME含有大量的二硫键、氢键以及金属-配体键等动态键合,因此在材料损伤界面存在丰富的未配对动态键合,这些悬挂的未配对键可以通过非常规扩散作用重新结合从而实现材料的自发修复。
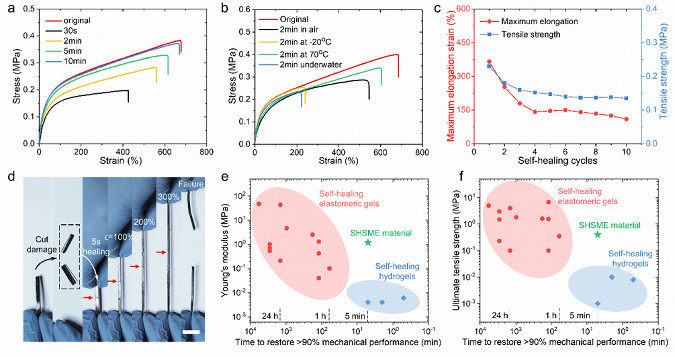
图1. SHSME的结构与自愈合原理 SHSME的自愈合性能表征 在切断-自愈合-拉伸测试的表征下,材料展示了优异的自愈合能力:在室温条件下,5s内可恢复300%的拉伸应变,10min内几乎完全恢复力学强度。SHSME在自愈合效率和力学强度之间达到了良好的平衡:有着媲美自愈合水凝胶的快速自修复能力,同时接近硅橡胶类材料的拉伸强度。此外,SHSME在水下和低温(-20oC)条件下也成功实现愈合效果。
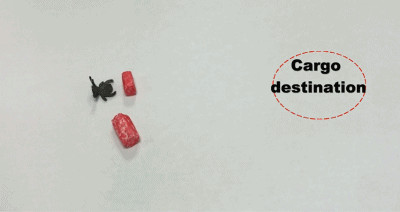
图2. SHSME的自愈合性能表征 基于SHSME的水陆两栖自愈合软体水蜘蛛 利用SHSME的热可重塑性设计构筑了软体水蜘蛛,磁控软体水蜘蛛不仅能够进行多种运动模式(站立、旋转、翻滚以及货物搬运),并且在陆地和水下遭到切割损坏后,都实现了即时(5s)的运动功能恢复,为两栖自愈合软体机器人提供了设计思路。
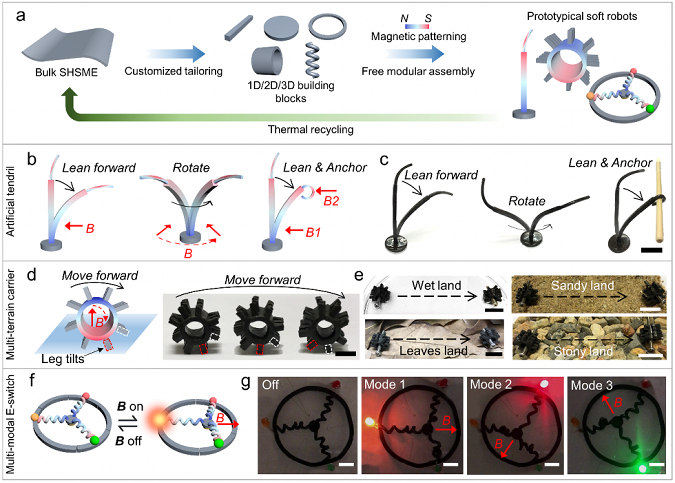
图3.软体水蜘蛛的运动模式以及水陆两栖自愈合能力 基于SHSME的模块化组装软体机器人设计平台 利于SHSME的快速自愈合以及材料热可逆性,研究人员提出了一种模块化组装多功能软体机器人的材料可循环式设计平台,并展示了包括人造藤蔓、多地形运载器以及多模态电子开关等一系列的三维结构功能性软机器人。
图4. 闭环式模块组装多功能软体机器人 基于SHSME的限制性空间内机器任务设计 限制性空间的狭窄通道对于软体机器人的部署是个巨大的挑战。研究人员利用SHSME的非接触式远程磁控运动和磁控组装,提出了一种远程操控的“分解-导航-再组装”策略,实现软体机器人的穿越部署与任务完成。在应用实例中,多足机器人“化整为零”后爬行入狭窄通道并完成重新组装,充当桥梁协助水蜘蛛完成搬运任务。
图5. 基于SHSME的“分解-导航-再组装”策略 原文链接:https://onlinelibrary.wiley.com/doi/abs/10.1002/adfm.202101825 |